现代计算机图形学入门
本文最后更新于:2025年1月23日 晚上
现代计算机图形学入门
- 可选教材: Fundamentals of Computer Graphics(虎书 tiger book)
- 课程网址:GAMES101: 现代计算机图形学入门 (ucsb.edu)
- 计算机图形学与混合现实研讨会BBS:计算机图形学与混合现实在线平台 – GAMES: Graphics And Mixed Environment Symposium (games-cn.org)
- 闫令琪个人主页:Lingqi Yan: Research Homepage (ucsb.edu)
Course Topics
-
Rasterization 光栅化
-
Curves and Meshes 曲线和曲面
-
Ray Tracing 光线追踪
-
Animation / Simulation 动画与模拟
Review of Linear Algebra
-
判断内外可用叉乘
-
叉乘矩阵表示
-
引入Homogeneous Coordinates(齐次坐标)
-
目的是消除图像平移的特殊性,将所有变换转换成矩阵乘积形式
-
使用方法:加入第三个维度Add a third coordinite(w-coordinate)
-
2D point = (x,y,1)T (点)
-
2D vector=(x,y,0)T (向量)
-
平移:
-
-
-
Valid operation if w-coordinate of result is 1 or 0
- vector + vector = vector
- point - point = vector
- point + vector = point
- point + point = midpoint
-
In homogeneous coordinates
-
-
Affine map = linear map + translation
-
-
Using homogenous coordinates
-
-
对于旋转来说
-
3D Transforms
-
Use homogeneous coordinates again
- 3D point = (x,y,z,1)T
- 3D vector = (x,y,z,0)T
-
In general, (x,y,z,w)(w!=0) is the 3D point (x/w,y/w,z/w)
-
Use 4*4 matrices for affine transformations
-
-
Rotation around x-, y-, or z-axis
-
-
tips: There is something strange about Ry
-
-
Rodrigues’ Rotation Formula罗德里格斯旋转公式
- Rotation by angle around axis
- (右边这个矩阵刚好是叉乘矩阵)
四元数
Viewing(观测) transformation
- View(视图)/Camera transformation
- Projection(投影) transformation
- Orthograpgic(正交) projection
- Perspective(透视) projection
View/Camera Transformation
-
How to take a photo
- Find a good place and arrange people(model transformation)
- Find a good “angle” to put the camera(view transformation)
- Cheese!(projection transformation)
-
Define the camera first
- Position
- Look-at / gaze direction
- Up direction (assuming perp. to look-at)
-
Key observation
- If the camera and all objects move together, the “photo” will be the same
-

-
-
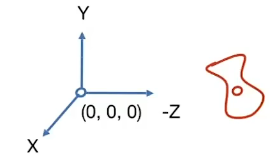
How about that we always transform the camera to
- The origin, up at Y, look at -Z
- And transform the objects along with the camera
-
Transform the camera by Mview
- So it’s located at the origin, up at Y, look at -Z
-

-
Mview in math?
- Translate e to origin
- Rotates g to -Z
- Rotates t to Y
- Rotates (g x t) To X
- Let’s write Mview=RviewTview 先平移再线性变换
-
Translate e to origin
-
Rotate g to -Z, t to Y, (g t) to X
-
Consider its inverse rotation: X to (g t), Y to t, Z to -g
-
怎么得到的?
- 举例:
-
-
旋转矩阵是正交矩阵,所以他的逆就是他的转置。
-
Summary
- Transform objects together with the camera
- Until camera’s at the origin, up at Y, look at -Z
-
Also known as ModelView Transformation
Orthographic Projection
-
A simple way of understanding
- Camera located at origin,looking at -Z, up at Y
- Drop Z coordinate
- Translate and scale the resulting rectangle to [-1,1]2
-
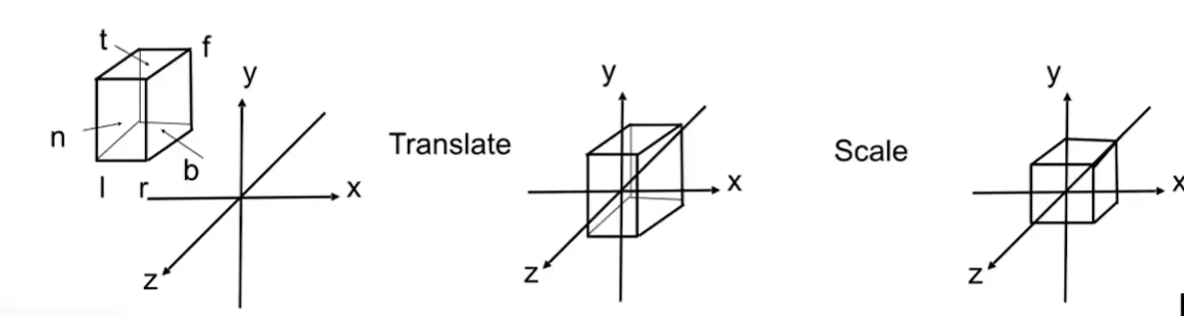
In general
-
We want to map a cuboid [l,r][b,t][f,n] to the "canonical(正则、规范、标准)"cube [-1,1]3
-
-
Slightly different orders (to the “simple way”)
- Center cuboid by translation
- Scale into “canonical” cube
-
Translate (center to origin) first, then scale (length/width/height to 2)
-
-
Perspective Projection
-
Most common in Computer Graphics, art, visual system
-
Further objects are smaller
-
Parallel lines not parallel; converge to single point
-
How to perspective projection
- First “squish” the frustum into a cuboid(n->n,f->f)()
- Do orthograpgics projection( ,already know!)
-
In order to find a transform
- Recall the key idea: Find the relationship between transformed points(x’,y’,z’) and the original points(x,y,z)

- {similar to y’}
-
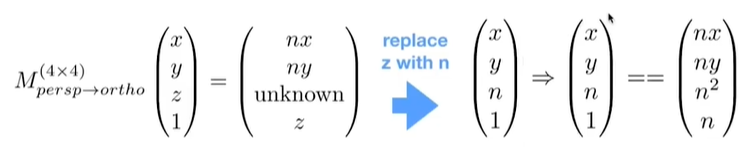
In homogeneous coordinates
-
So the “squish” (persp to ortho) projection does this
-
-
Already good enough to figure out part of
-
-
Any information that we can user?
-
-
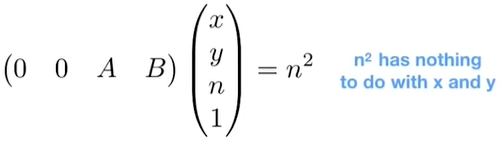
Observation: the third row is responsible for z’
- Any point on the near plane will not change
- Any point’s z on the far plane will not change
-
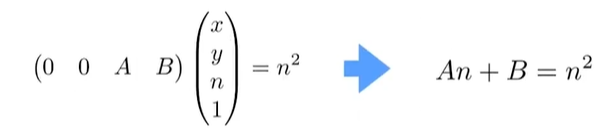
So the third row must be of the form(0 0 A B)
-
What do we know now?
-
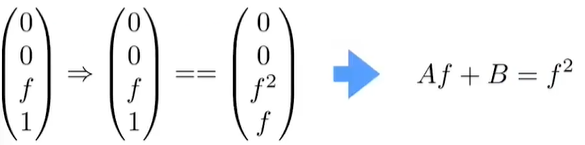
Any point’s z on the far plane will not change
-
Solve for A and B
-
Finally, every thing in is known!
-
What’s next?
- Do orthographic projection(Mortho) to finish


一、Rasterization 光栅化
- 光栅化:
- 把三维空间的几何实体显示在屏幕上
Canonical Cube to Screen
-
Irrelevant to z
-
Transform in xy plane: [-1,1]2 to [0,width][0,height]
-
Viewport transform matrix
-
Sampling Artifacts in Computer Graphics
-
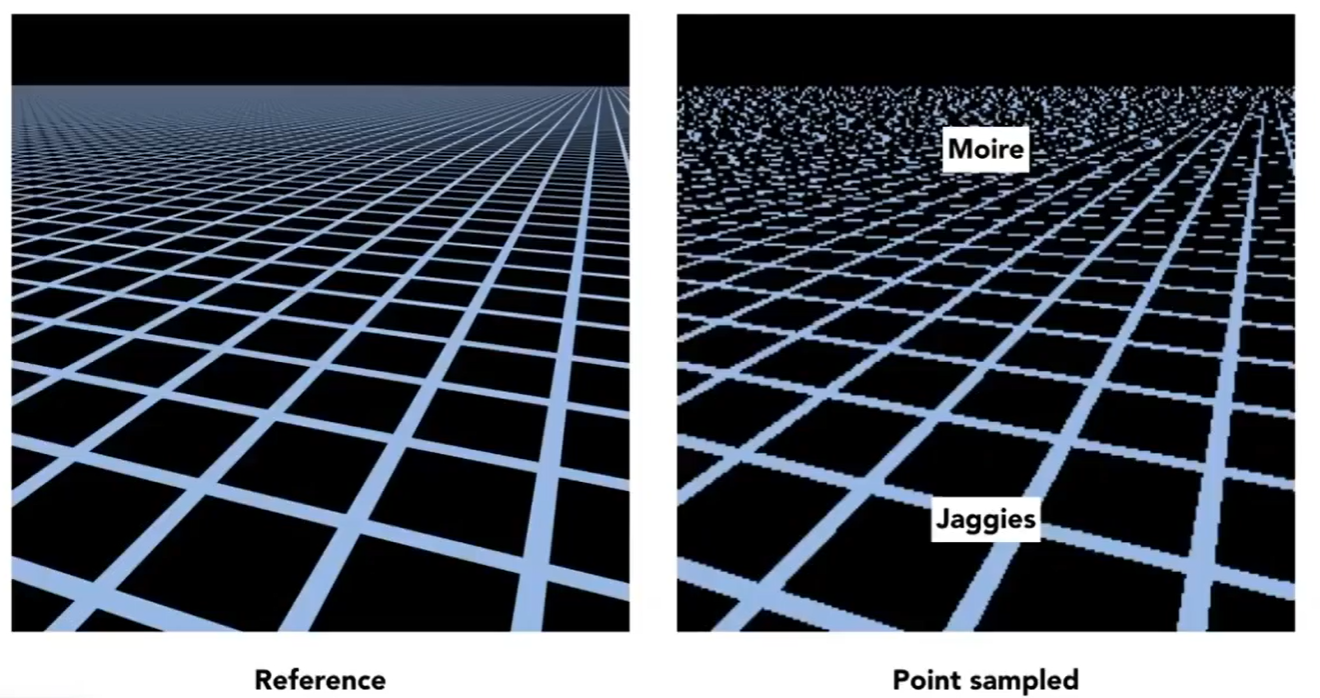
Artifacts due to sampling - “Aliasing”
-
Jaggies - samping in space
-
Moire - undersampling images
-
Wagon wheel effect - sampling in time
-
[Many more]…
-
-
Behind the Aliasing Artifacts
- Signals are changing too fast(high frequency) but sampled too slowly
Antialiasing
Antialiasing Idea: Blurring(Pre-Filtering) Before Sampling
Sampling theory
Antialiasing in practice
-
MSAA(By Supersampling)
-
FXAA(Fast Approximate AA)
-
TAA(Temporal AA)
-
Super resolution / super sampling
- From low resolution to high resolution
- Essentially still “not enough samples” problems
- DLSS(Deep Learning Super Sampling)
Visibility/occlusion
Z-buffering
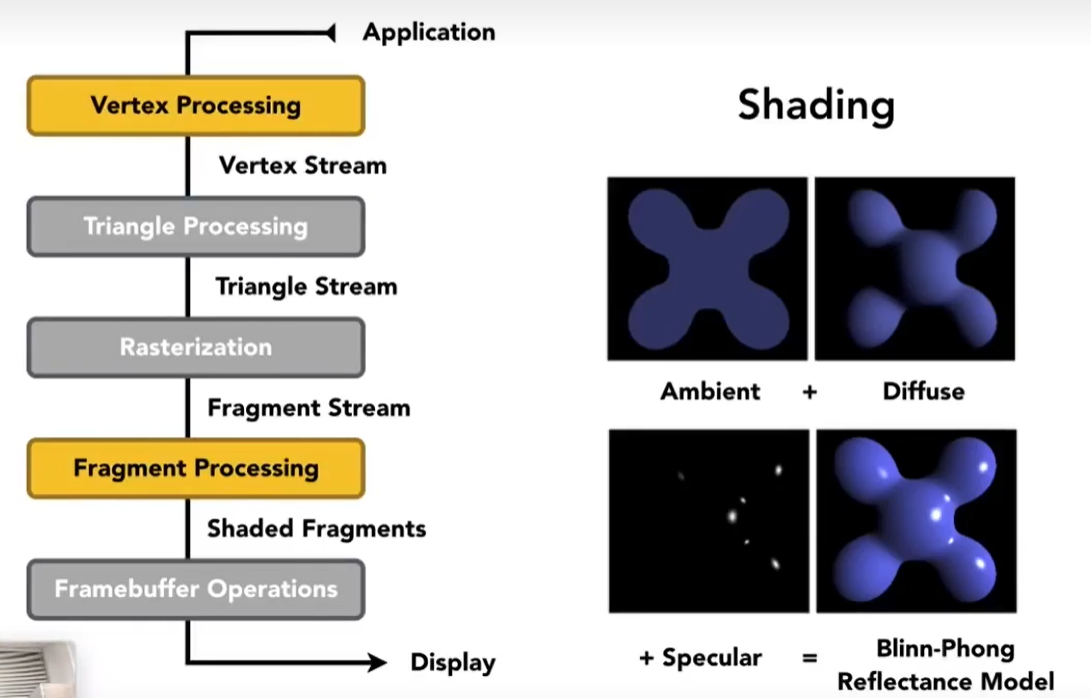
二、Shading
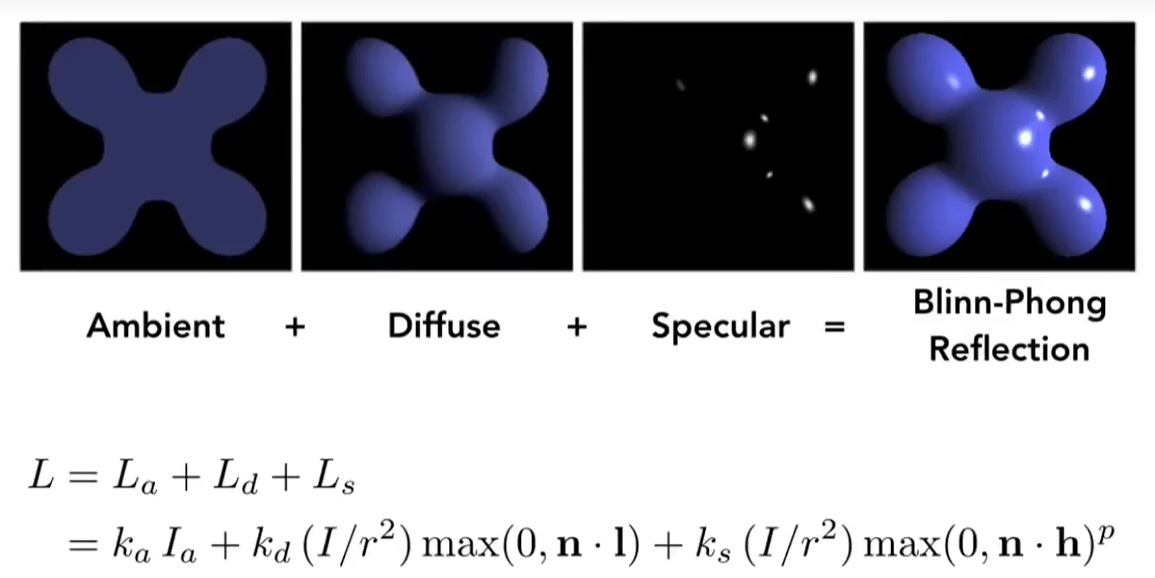
A Simple Shading Model(Blinn-Phong Reflectance Model)

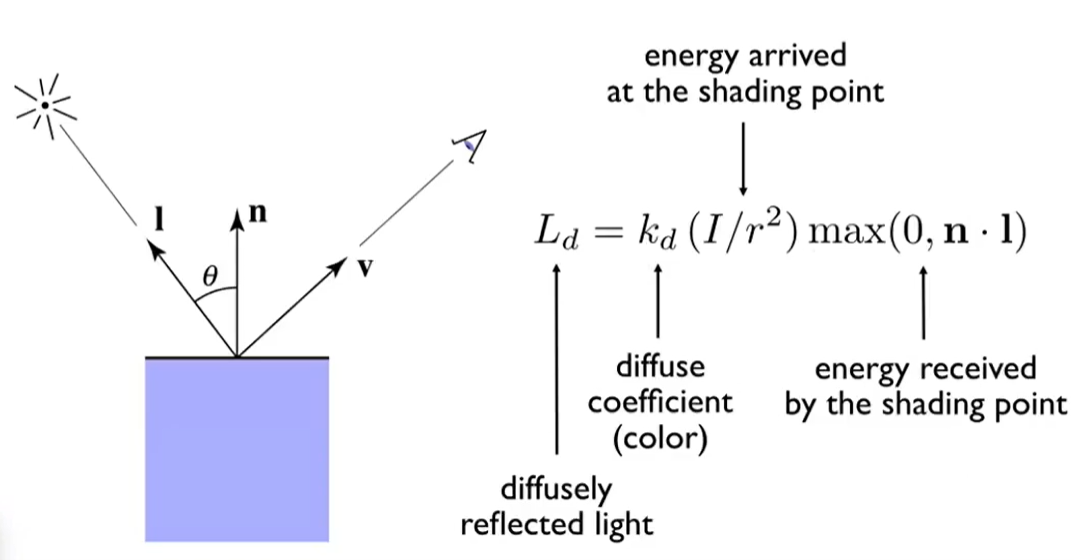
Diffuse Reflection
- Lambert’s cosine law

- Shading independent of view directing 漫反射出去的光朝四面八方都一样,与v无关
Specular reflection
-
Intensity depends on view direction
- Bright near mirror reflection direction镜面反射方向最亮
-
V close to mirror direction 相似 half vector near normal
- Measure “near” by dot product of unit vectors

- 上面的指数p 是根据角度与余弦值关系加上的,减小容忍度。Incresing p narrows the reflection lobe. P越大,高光范围越小
Ambient Reflection
-
Shading that does not depend on anything
- Add constant color to account for disregarded illumination and fill in black shadows
- This is approximate / fake!

-
所有项加起来
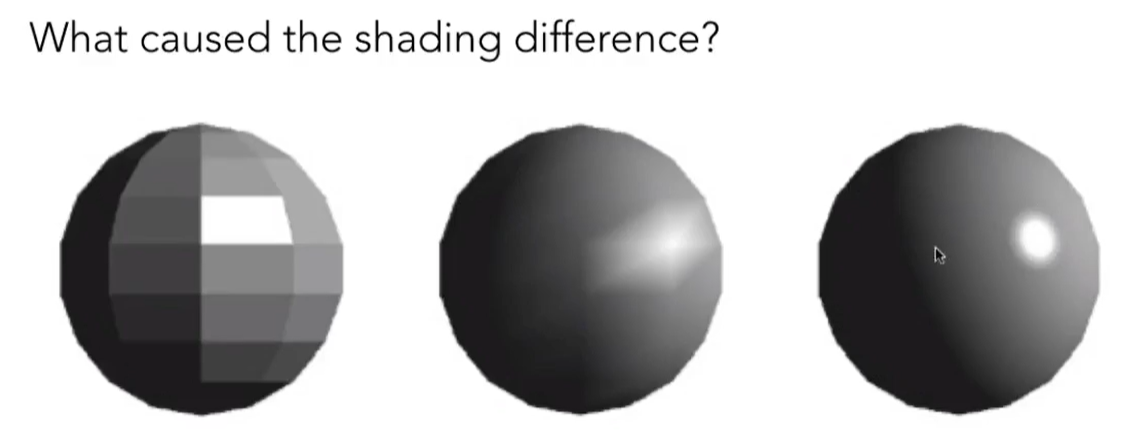
Shading Frequencies
-
从左到右
-
Flat Shading每个平面计算一个法线
- Triangle face is flat - one normal vector
- Not good for smooth surfaces
-
Gouraud shading每个顶点计算一个法线然后做插值
- Interpolate colors from vertices across triangle
- Each vertex has a normal vector(how?)
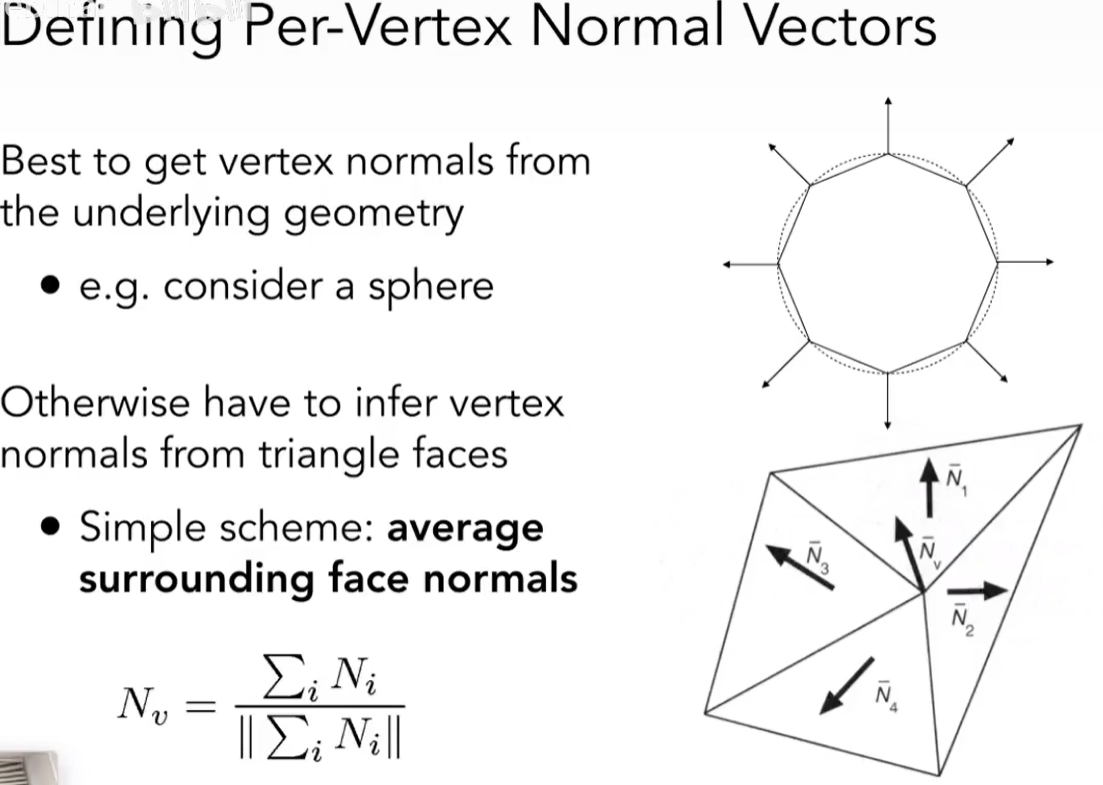
-
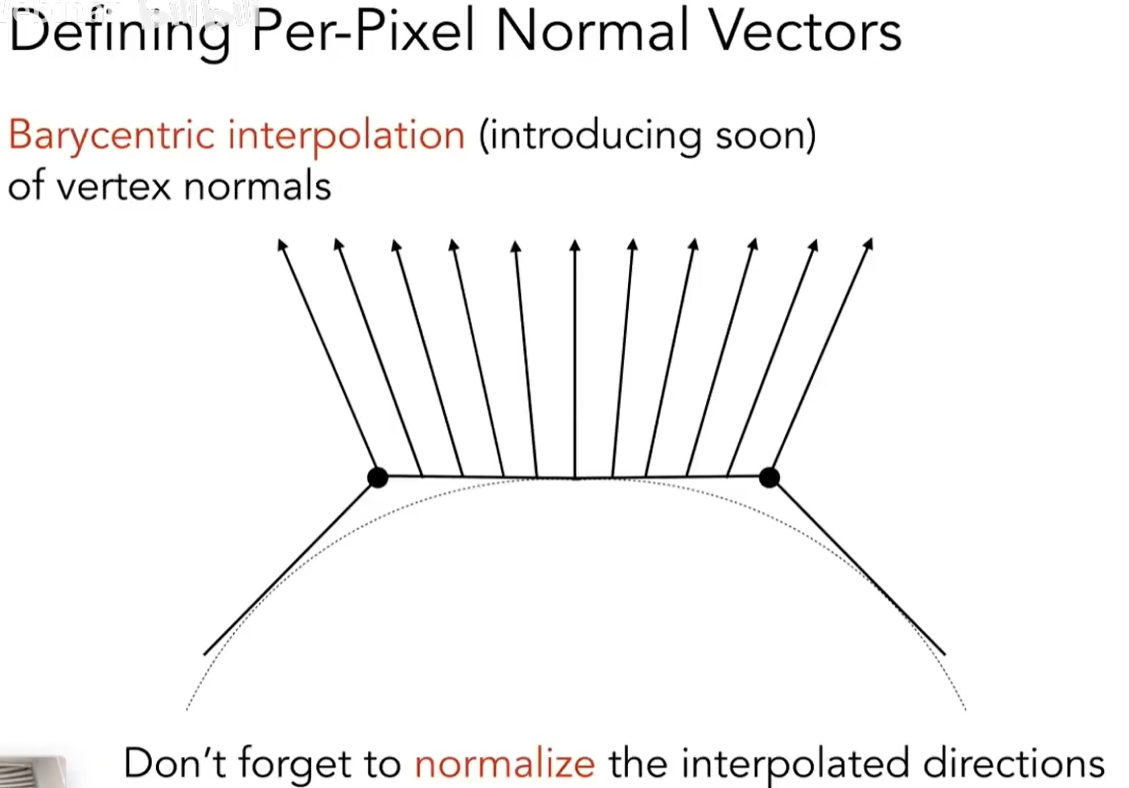
Phong shading每个像素计算一个法线
- Interpolate normal vectors across each triangle
- Compute full shading model at each pixel
- Not the Blinn-Phong Reflectance Model
-
Graphics(Real-time Rendering) Pipeline
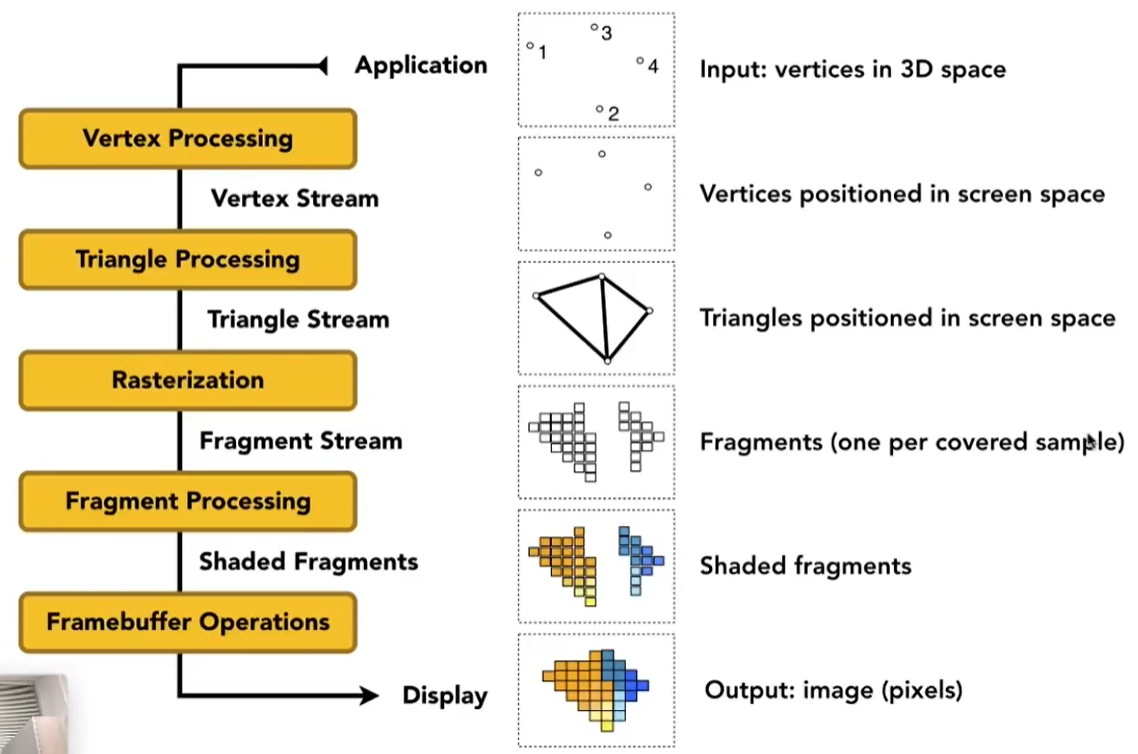
注意:shading的地方:
- 如果是顶点着色,就可以发生在Vertex Processing
- 如果是Phong着色,就会发生在Fragment Processing
Shader Programs
- Program vertex and fragment processing stages
- Describe operation on a single vertex(or fragment)
- Example GLSL fragment shader program
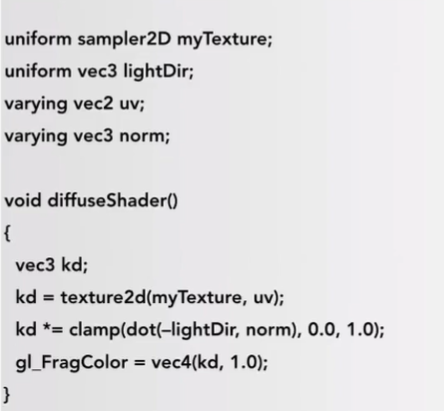
- Shader function executes once per fragment.
- Outputs color of surface at the current fragment’s screen sample position.
- This shader performs a texture lookup to obtain the surface’s material color at this point, then performs a diffuse lighting calculation.
Texture Mapping
Interpolation Across Triangles Barycentric Coordinates(中心坐标)
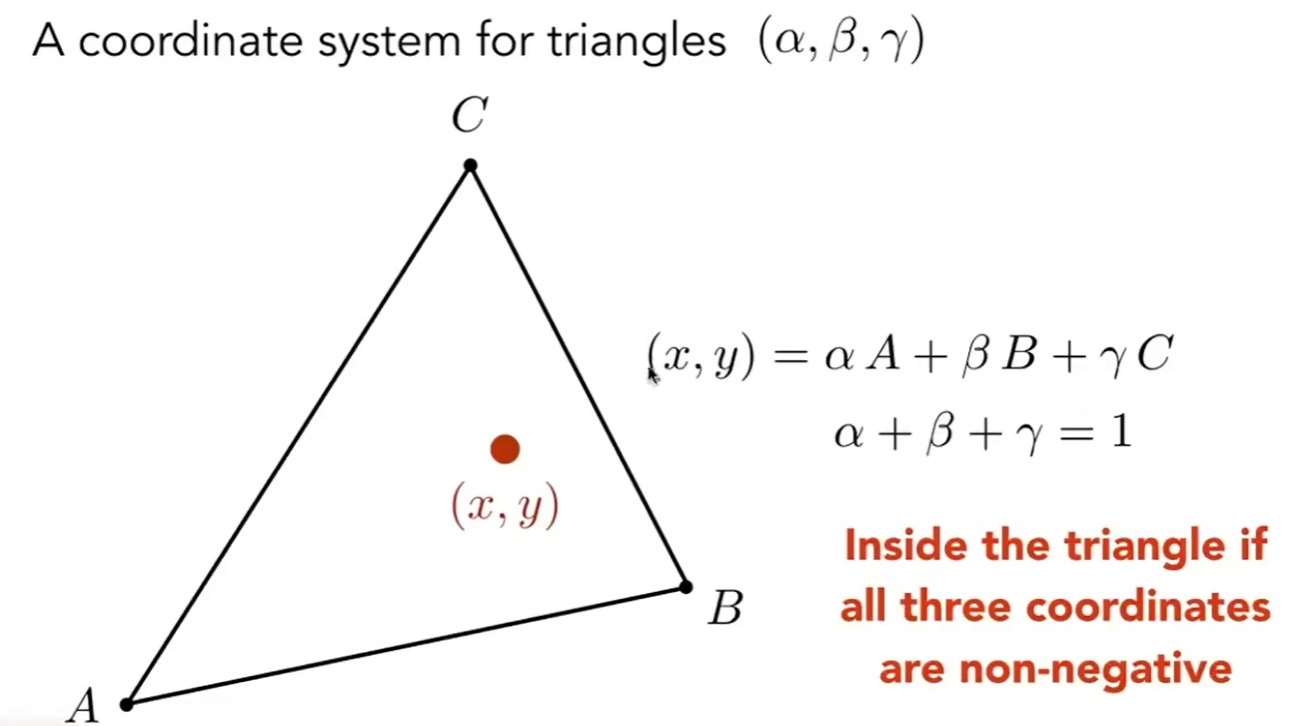
- 三个系数如果都是非负的,则中心坐标一定在三角形内。

- 重心坐标三个系数都是三分之一


- 投影前计算出来的中心坐标无法投影到投影后计算出的中心坐标(要在投影之前计算出来重心)
Applying Texture

Texture Magnification(What if the texture is too small?) - Easy Case(纹理比图像分辨率小的问题)
Generally don’t want this - insufficient texture resolution
A pixel on a texture - a texel(纹理元素、纹素)

- 双线性插值
- Bilnear interpolation usually gives pretty good results at reasonable costs

Texture Magnification(What if the texture is too large) - hard case(纹理比图像分辨率大的问题)
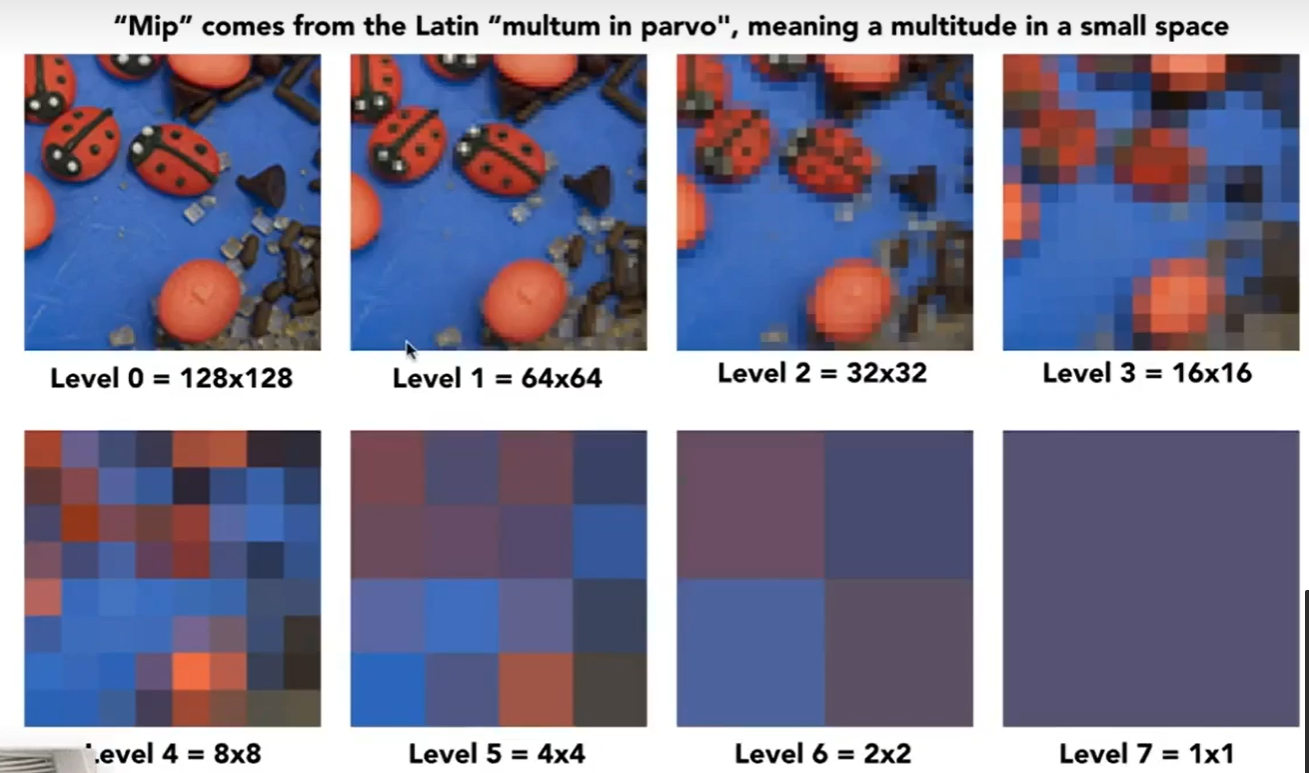
Mipmap Allowing(fast,approx.,square) range queries
- 额外的三分之一存储
Computing Mipmap Level D
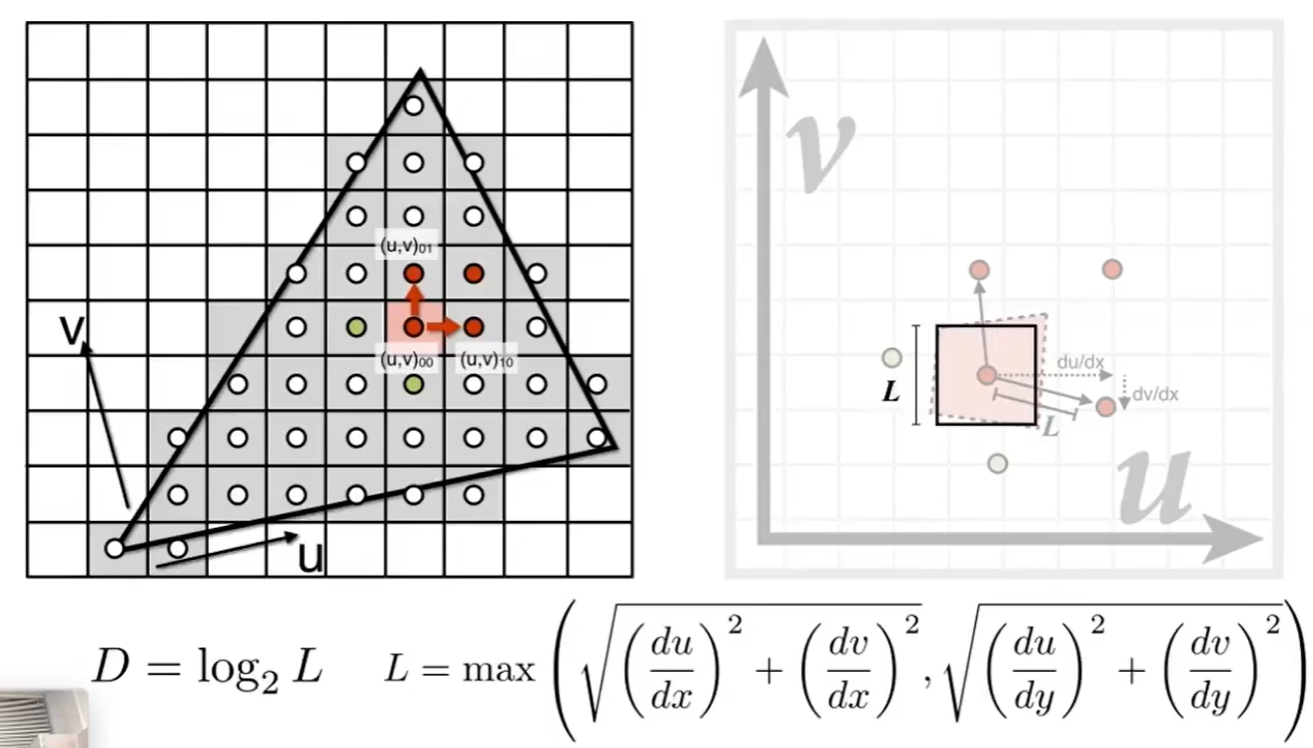
- 对映射过去的正方形做近似,应用Mipmap Allowing将矩形变成第D层的1$\times$1矩形,映射到一个像素中
Visualization of Mipmap Level
- 单纯的映射效果不好,因为mipmap取层数是离散的,会出现间断的线
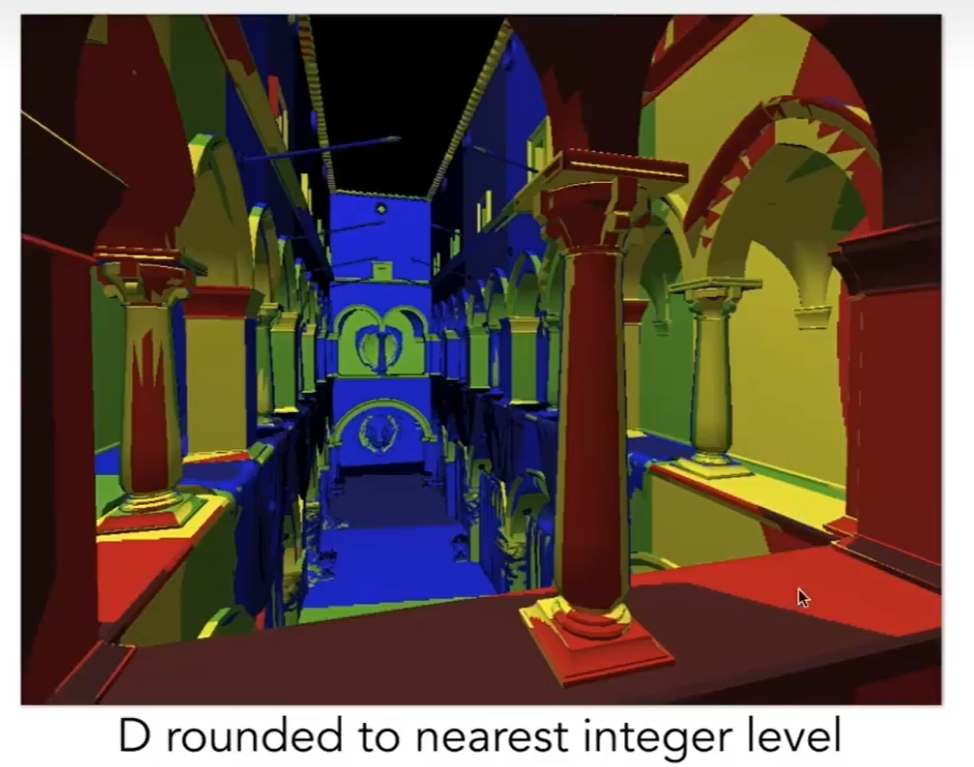
因此可做一次三线性插值,取连续插值层texel(纹理元素,纹素)
Trilinear Interpolation
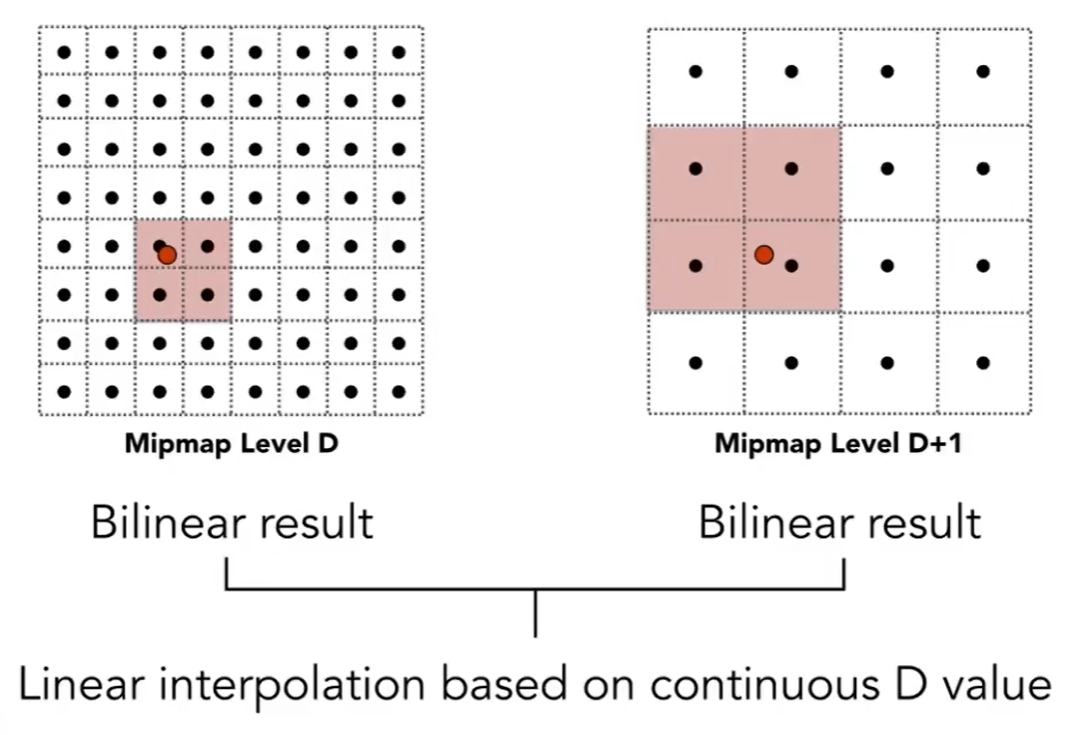
-
在相邻两层中各做双线性插值,然后将结果再做一次线性插值。
-
但这样做效果并不好,远处的细节都会模糊(Overblur),使用下面来改善
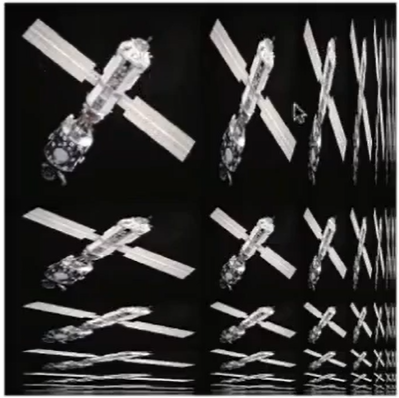
Anisotropic Filtering(各向异性过滤)
Ripmaps and summed area tables
- Can look up axis-aligned rectangular zones
- Diagonal footprints still a problem
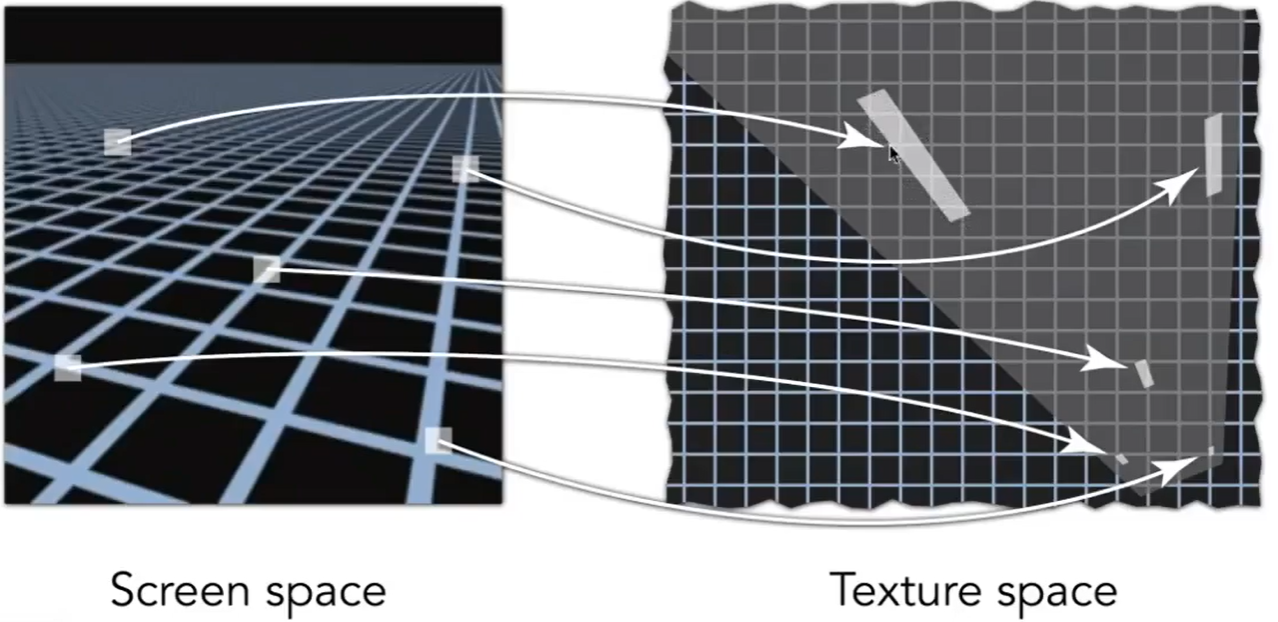
Irregular Pixel Footprint in Texture(不用水平竖直都压缩,可以只压缩一个方向),但是还有一些情况没能解决,比如映射过去覆盖的是一种斜着的长条
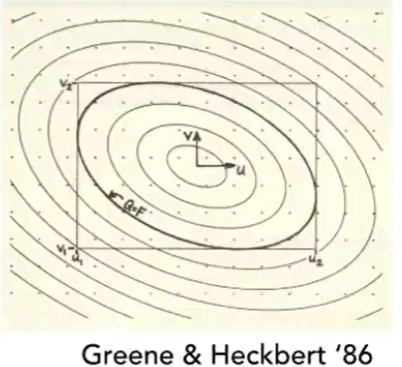
EWA filtering
- Use multiple lookups
- Weighted average
- Mipmap hierarchy still helps
- Can handle irredular footprints
Many, Many Uses for Texturing
In modern GPUs, texture = memory + range query(filtering)
- General method to bring data to fragment calculations
Textures can affect shading!
- Texture doesn’t have to only represent colors
- What if it stores the height/normal?
- Bump / normal mapping
- Fake the detailed geometry
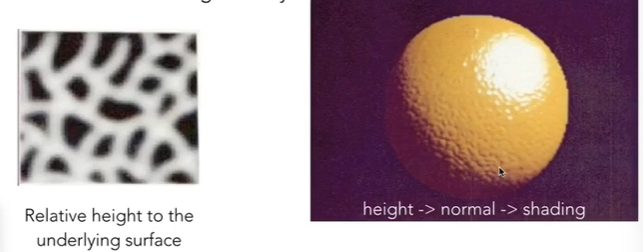
Bump Mapping
Adding surface detail without adding more triangles
-
Perturb surface normal per pixel(for shading computations only)
-
“Height shift” per texel defined by a texture
-
How to modify normal vector?

How to perturb the normal(in flatland)
- Original surface normal n§ = (0,1)
- Derivative at p is dp = c * [h(p+1) - h§]
- Perturbed normal is then n§ = (-dp,1).normalized()

How to perturb the normal (in 3D)
- Original surface normal n§ = (0,0,1)
- Derivatives at p are
- dp/dv = c1* [h(u+1) - h(u)]
- dp/dv = c2 * [h(v+1) - h(v)]
- Perturbed normal is n = (-dp/du, -dp/dv,1).normalized()
- Note that this is in local coordinate!
Displacement mapping
a more advanced approach
- Uses the same texture as in bumping mapping
- Actually moves the vertices

三、Geometry
Many Ways to Represent Geometry
- Implicit
- algebraic surface
- level sets
- distance functions
- Explicit
- point cloud
- polugon mesh
- subdivision,NURBS
“Implicit” Representations of Geometry
Based on classifying points
- Points satisfy some specified relationship
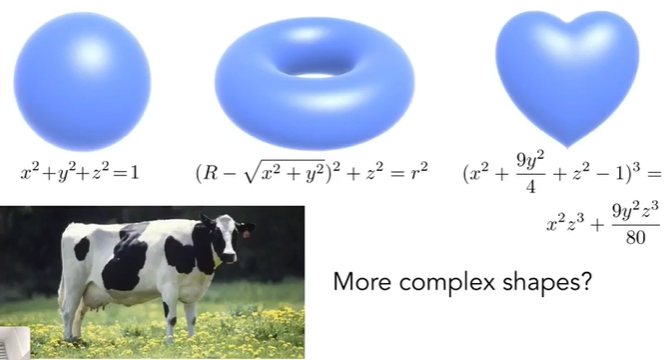
E.g. sphere: all points in 3D,where x2+y2+z2=1
More generally,f(x,y,z) = 0
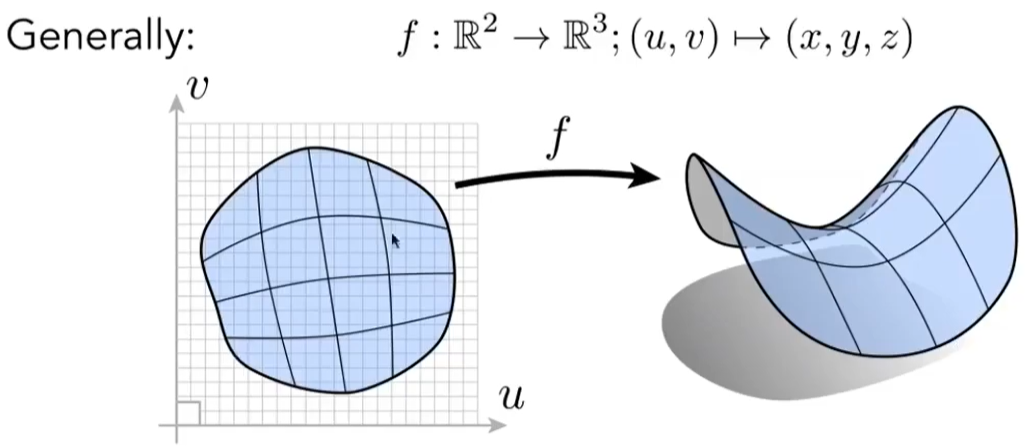
“Explicit” Representations of Geometry
All points are given directly or via parameter mapping
Implicit
Algebraic Surfaces(Implicit)
Surface is zero set of a polynomial in x,y,z
Constructive Solid Geometry(Implicit)
Combine implicit geometry via Boolean operations
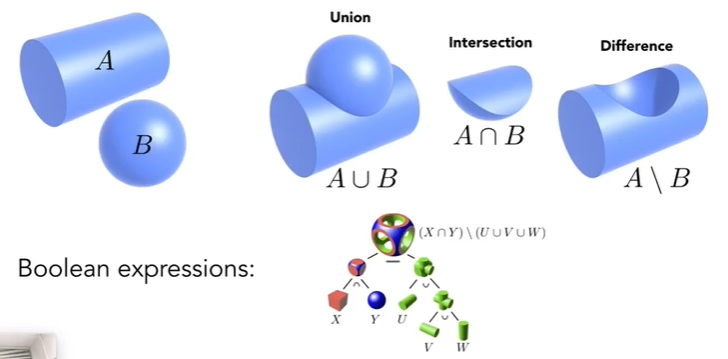
Distance Fuctions(Implicit)
Instead of Booleans, gradually blend surfaces together using
-
Distance fuctions:
giving minimum distance(could be signed distance) from anywhere to object
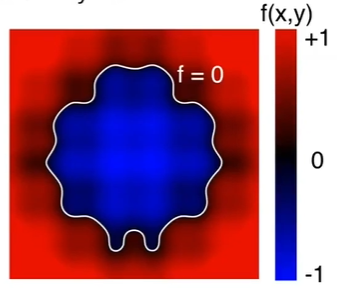
Level Set Methods
Closed-form equations are hard to describe complex shapes
Alternative: store a grid of values approximating function
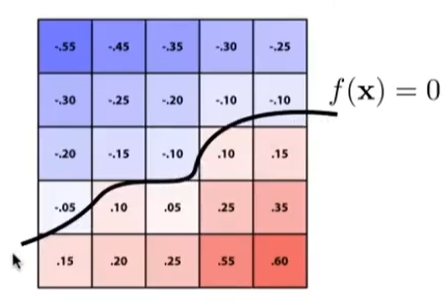
Surface is found where interpolated values equal zero
Provides much more explicit control over shape(like a texture)
Fractals(Implicit)(分形)
Exhibit selt-similarity, detail at all scales
“Language” for describing natural phenomena
Hard to control shape!
Implicit Representations - Pros & Cons
- Pros:
- compact description(e.g., a fuction)
- certain queries easy(inside object, distance to surface)
- good for ray-to-surface intersection(more later)
- for simple shapes, exact description / no sampling error
- easy to handle changes in topology(e.g., fluid)
- Cons:
- difficult to model complex shapes
Explicit
Point Cloud
Easiest representation: list of points(x,y,z)
Polygon Mesh
Store vertices & polygons(often triangles or quads)
Easier to do processing/simulation,adaptive sampling
More complicated data structures
Perhaps most common representation in graphics
Curves
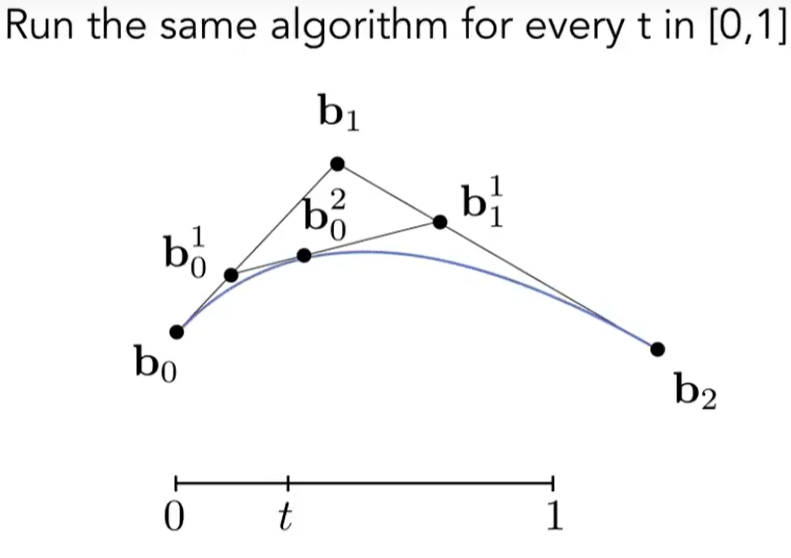
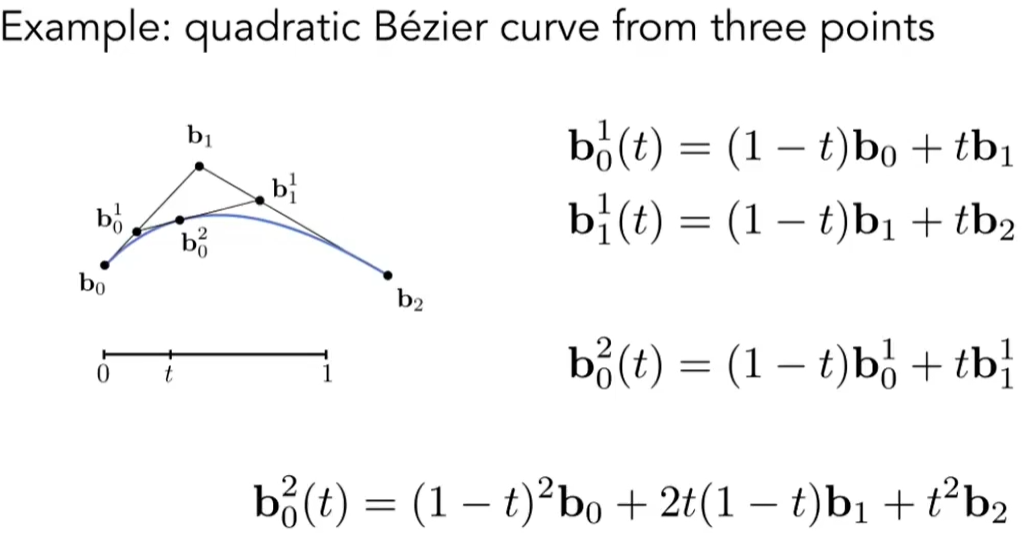
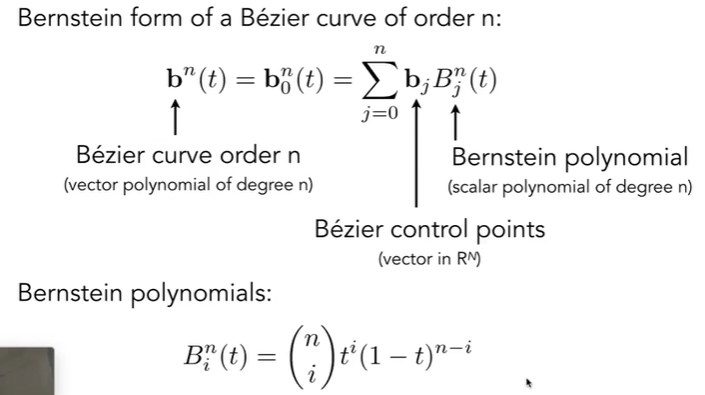
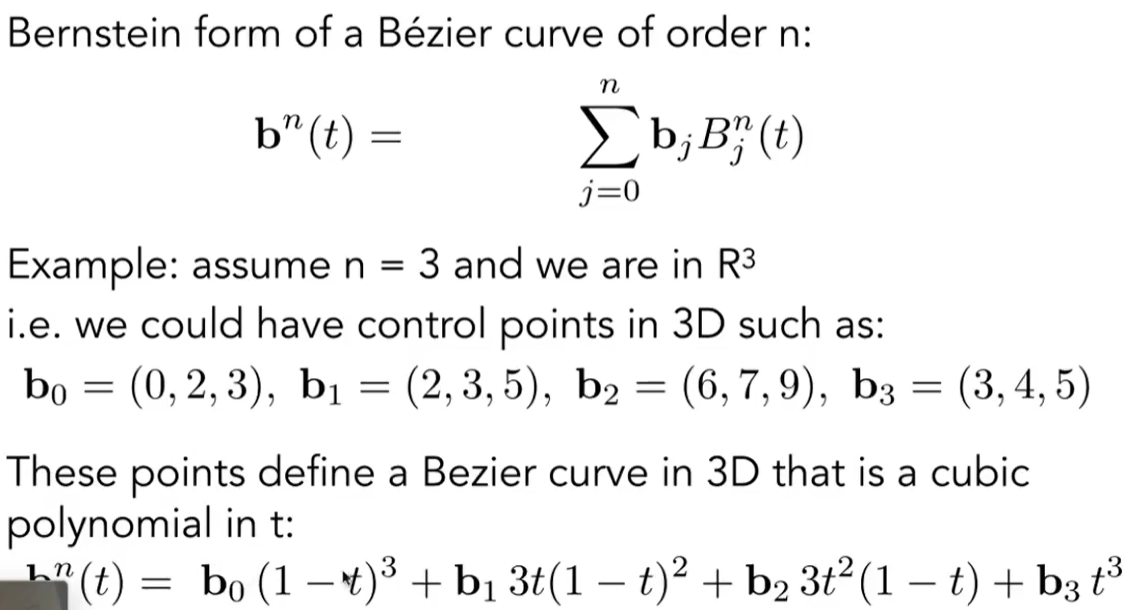
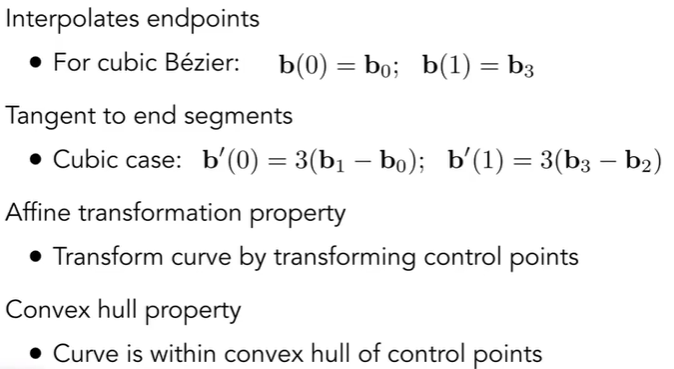
Bezier Curves(贝塞尔曲线)
- Defining Cubic Bezier Curve With Tangents
曲线要经过起止点
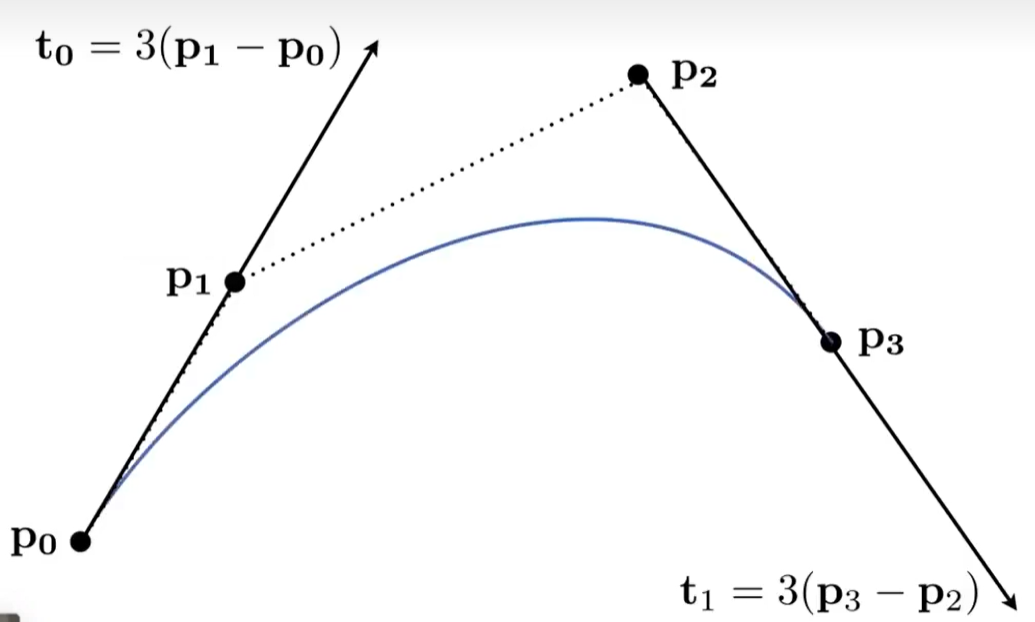
- de Casteljau Algorithm